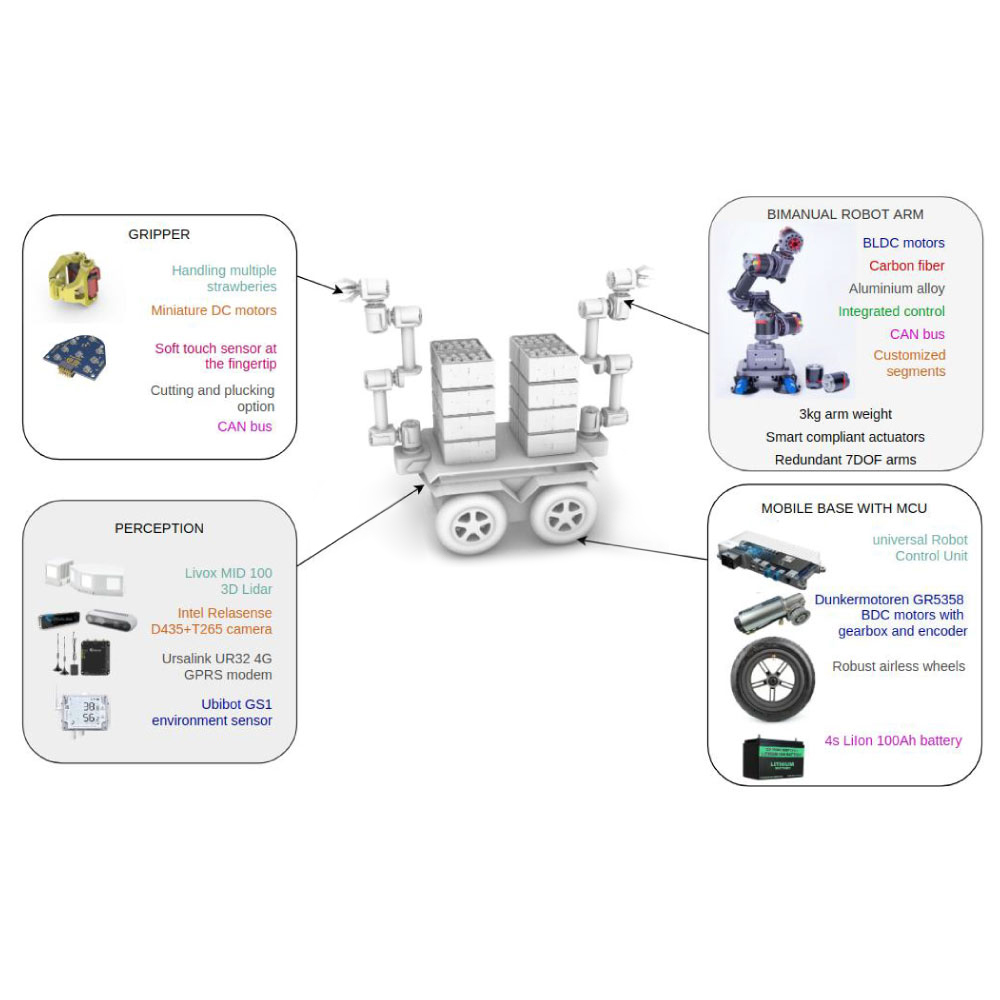
Harvesting – simple, repetitive tasks in a relatively structured environment – still accounts for 25% of all costs in strawberry production. The reason? It’s still mostly done manually, while many other strawberry production tasks are already automated.